









High fidelity simulation environment
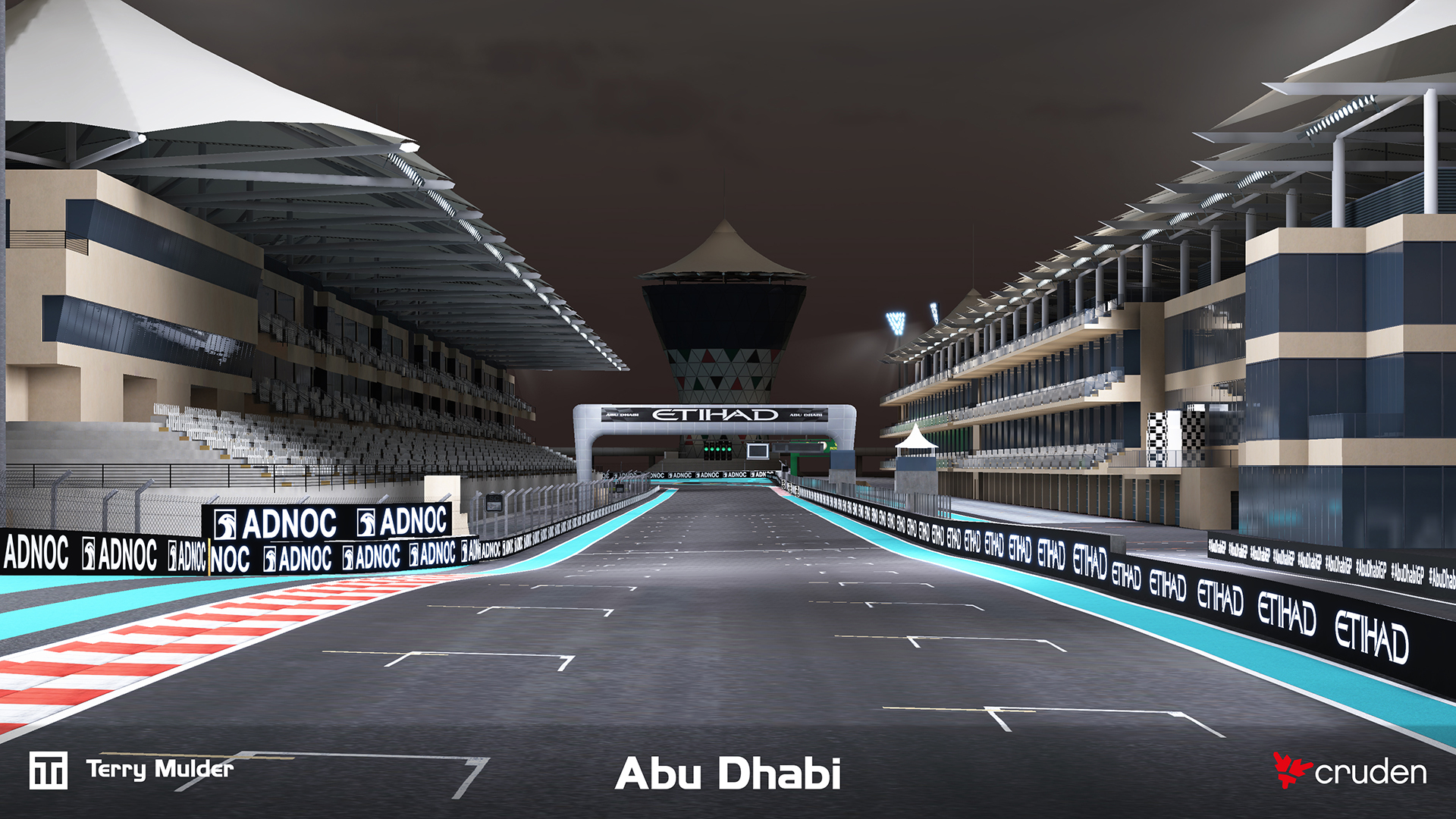
High accuracy 3D environment of the Abu Dhabi Formula 1 circuit developed for Cruden’s professional motorsport simulators.
Professional training and engineering simulators depend on tightly correlated visual and physical environments. The challenge was delivering a highly accurate track surface and surrounding environment in which LiDAR-derived geometry, visual cues and vehicle dynamics data align closely enough for simulator feedback to translate directly to real-world driving behaviour and engineering insight.
The track was initially developed for an entertainment focused installation at Ferrari World Abu Dhabi to be used on the 10 Cruden simulators of Scuderia Challenge. The track was based on CAD data and was developed parallel to the construction of the physical track.
The track was later upgraded for professional motorsport simulation. The drivable surface was completely overhauled to match the LiDAR dataset, to improve the overall accuracy.
The second iteration was built using LiDAR scan data, enabling a precise representation of the real-world circuit. This data is used not only for the visual environment but also feeds into vehicle models, ensuring subtle surface details and track nuances are reflected in the driving experience and perfectly correlated.
The environment is designed to meet the demands of high-performance, ultra-low-latency visualisation systems, including multi-monitor setups, projectors and modular LED walls running at up to 4K resolution and 120–240 Hz per image generator. Critical visual cues such as road, kerbs, brake markers, road markings, gantries and more are accurately placed to support professional training and simulation.
The final environment is deployed in a full motion training simulator for driver training, engineering validation and car development, meeting strict performance targets while maintaining high visual fidelity.
What I worked on
- Translate CAD data to drivable environment
- Capture photo & video reference data on-site and on-track
- Process and prepare LiDAR scan data for visuals
- Process, clean and prepare LiDAR scan data for road surface
- Creating the visual mesh for the drivable surfaces
- Creating the visual meshes for surroundings (barriers, foliage, buildings and other track elements)
- Unwrapping all geometry
- Creating the necessary (PBR) textures for the entire environment
- Preparing environment for Unity specific elements like; light baking, reflection probes, volumes
- Configure all materials, shaders in Unity
- Configure lighting, light baking, reflection probes in Unity
- Configure all proprietary elements for Cruden’s software (meta files, artwork, build pipeline)
- Testing and quality control (both on workstation and simulator)